
基于CIFAR-10图像分类任务训练线性分类器、MLP和CNN模型
一、模型原理
1)Softmax分类器
Softmax分类器是一个单层线性神经网络,即只有一个输入层、一个输出层,再经过Softmax函数激活层,得到标签的预测概率。Softmax函数能够将未规范化的预测变换为非负数并且总和为1,同时让模型保持可导的性质。
实现一个Softmax线性分类模型:
1
2
3
4
5
6
7
8
class Softmax(nn.Module):
def __init__(self, inNum, outNum) -> None:
super(Softmax, self).__init__()
self.out = nn.Linear(inNum,outNum)
def forward(self, x):
y = F.relu(self.out(x.view(x.shape[0],-1)))
y = F.log_softmax(y,dim=0)
return y
2)MLP
通过在网络中加入一个或多个隐藏层,可以克服线性模型的限制, 使其能处理更普遍的、非单调的函数关系类型。将许多全连接层堆叠在一起,每一层都输出到上面的层,直到生成最后的输出。 我们可以把前L−1层看作表示,把最后一层看作线性预测器。 这种架构通常称为多层感知机(multilayer perceptron),通常缩写为MLP。

实现一个MLP模型:
该神经网络结构由一个输入层、三个隐藏层及一个输出层构成,在层与层之间使用ReLU激活层,最后用Softmax计算标签的预测概率。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
class MLP(nn.Module):
def __init__(self, inNum, outNum, hidden,hid2,hid3) -> None:
super(MLP, self).__init__()
self.hid = nn.Linear(inNum,hidden)
self.hid2 = nn.Linear(hidden,hid2)
self.hid3 = nn.Linear(hid2,hid3)
self.out = nn.Linear(hid3,outNum)
def forward(self, x):
x = F.relu(self.hid(x.view(x.shape[0],-1))) #input(3,32,32) output(1024)
x = F.relu(self.hid2(x.view(x.shape[0],-1)))#output(256)
x = F.relu(self.hid3(x.view(x.shape[0],-1)))#output(84)
x = F.relu(self.out(x.view(x.shape[0],-1)))#output(10)
x = F.log_softmax(x,dim=0)
return x
3)CNN
卷积神经网络(convolutional neural network,CNN)是一类强大的、为处理图像数据而设计的神经网络。使用前述的模型时,将图像数据展平成一维向量而忽略了每个图像的空间结构信息,卷积神经网络则能弥补这个缺漏。
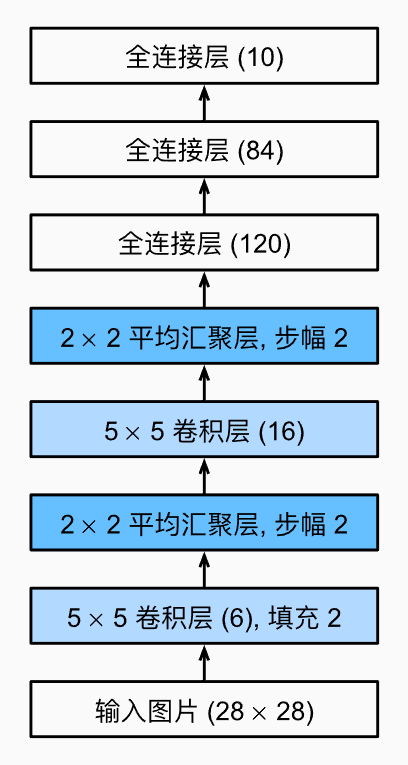
LeNet(LeNet-5)由两个部分组成:
- 卷积编码器:由两个卷积层组成;
- 全连接层密集块:由三个全连接层组成。

实现一个LeNet模型:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
class LeNet(nn.Module):
def __init__(self):
super(LeNet,self).__init__()
self.conv1 = nn.Conv2d(3,16,5)
self.pool1 = nn.MaxPool2d(2,2)
self.conv2 = nn.Conv2d(16,32,5)
self.pool2 = nn.MaxPool2d(2,2)
self.fc1 = nn.Linear(32*5*5,120)
self.fc2 = nn.Linear(120,84)
self.fc3 = nn.Linear(84,10)
def forward(self, x):
x = F.relu(self.conv1(x))#input(3,32,32) output(16,28,28)
x = self.pool1(x) #output(16,14,14)
x = F.relu(self.conv2(x)) #output(32,10,10)
x = self.pool2(x) #output(32,5,5)
x = x.view(-1,32*5*5) #output(5*5*32)
x = F.relu(self.fc1(x)) #output(120)
x = F.relu(self.fc2(x)) #output(84)
x = F.relu(self.fc3(x)) # output(10)
x = F.log_softmax(x, dim=1)
return x
4)网络参数
1、CUDA加速
利用GPU进行计算、让CPU读取数据,可以大幅减少训练的耗时,为此需要将数据与网络迁移到GPU上进行大规模计算。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
import torch
from torch import nn
# 查看gpu信息
cudaMsg = torch.cuda.is_available()
gpuCount = torch.cuda.device_count()
print("1.是否存在GPU:{}".format(cudaMsg), "如果存在有:{}个".format(gpuCount))
# 将数据/网络移到GPU上
net = net.cuda()
# 命令行
$ nvidia-smi #可以查看当前GPU适配的CUDA版本及显卡占用率
NVIDIA-SMI 522.25 Driver Version: 522.25 CUDA Version: 11.8
$ nvcc -V #可以确认CUDA是否已安装成功
nvcc: NVIDIA (R) Cuda compiler driver
Copyright (c) 2005-2022 NVIDIA Corporation
Built on Wed_Sep_21_10:41:10_Pacific_Daylight_Time_2022
Cuda compilation tools, release 11.8, V11.8.89
Build cuda_11.8.r11.8/compiler.31833905_0
事实上对于该模型,BatchSize=500时,N卡占用率顶多70%,多数时间有大量空余,真正占用时间的是迭代数据时,CPU对数据集图像的读取及预处理(即transform操作),这是由于CPU对Tensor的处理很慢,而torchvision库没有将数据集迁移到GPU进行预处理计算的API,若要解决这个问题,只能使用DALI或其余库接口加速预处理与数据读取,或者将预处理后的数据集进行保存。
2、损失函数
由于是预测标签概率类型的网络,在此次实验中都采用交叉熵函数。
1
2
3
import torch.nn as nn
# 损失函数
loss = nn.CrossEntropyLoss()
3、优化器
1
2
3
4
5
6
7
8
9
10
11
import torch
# SGD / SGD Momentum
optimizer = torch.optim.SGD(net.parameters(),lr=0.03,momentum=0.9, weight_decay=1e-5)
# Adam
optimizer = torch.optim.Adam(net.parameters(),weight_decay=1e-5)
# 控制学习率指数衰减
torch.optim.lr_scheduler.ExponentialLR(optimizer, gamma=0.98)
# 控制学习率按固定步长衰减
torch.optim.lr_scheduler.StepLR(optimizer, step_size=10, gamma=0.65)
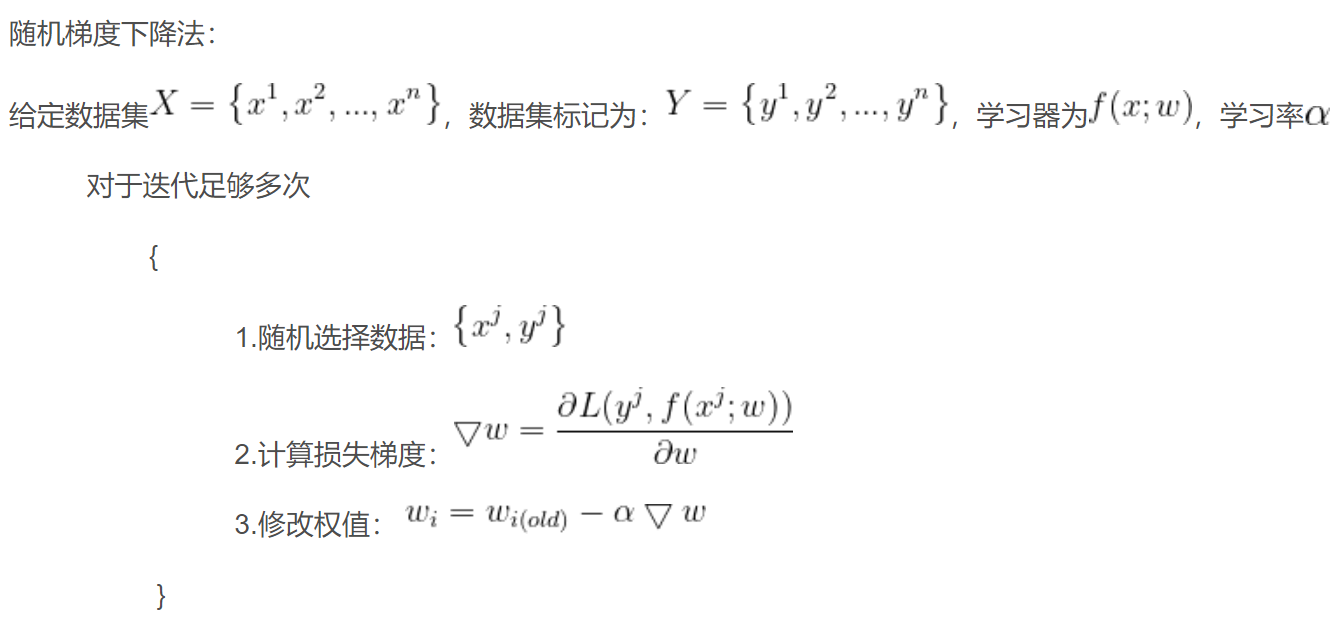
SGD(Stochastic Gradient Descent)
随机梯度下降算法即是在给定数据集中,每次随机选择一则数据,根据该数据的训练结果计算损失梯度,更新参数。
SGD Momentum
在随机梯度的学习算法中,每一步的步幅都是固定的,而在动量学习算法中,每一步走多远不仅依赖于本次的梯度的大小,还取决于过去的速度。速度v是累积各轮训练参数的梯度,速度越大,依赖以前的梯度越大。物理学中,用变量v表示速度,表明参数在参数空间移动的方向即速率,而代价函数的负梯度表示参数在参数空间移动的力,根据牛顿定律,动量等于质量乘以速度,而在动量学习算法中,我们假设质量的单位为1,因此速度v就可以直接当做动量了,我们同时引入超参数$\beta$,其取值在$[0,1]$范围之间,用于调节先前梯度(力)的衰减效果。 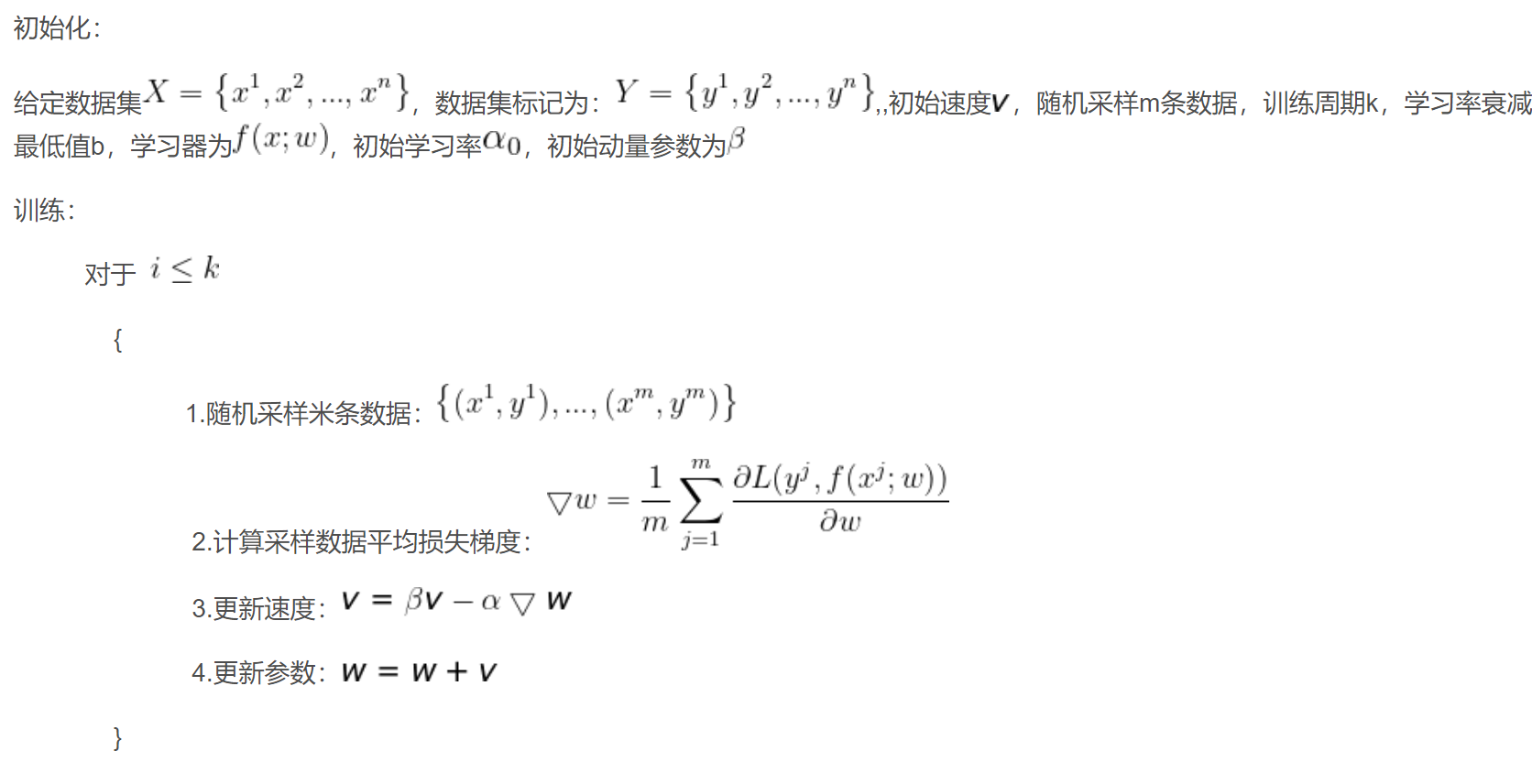
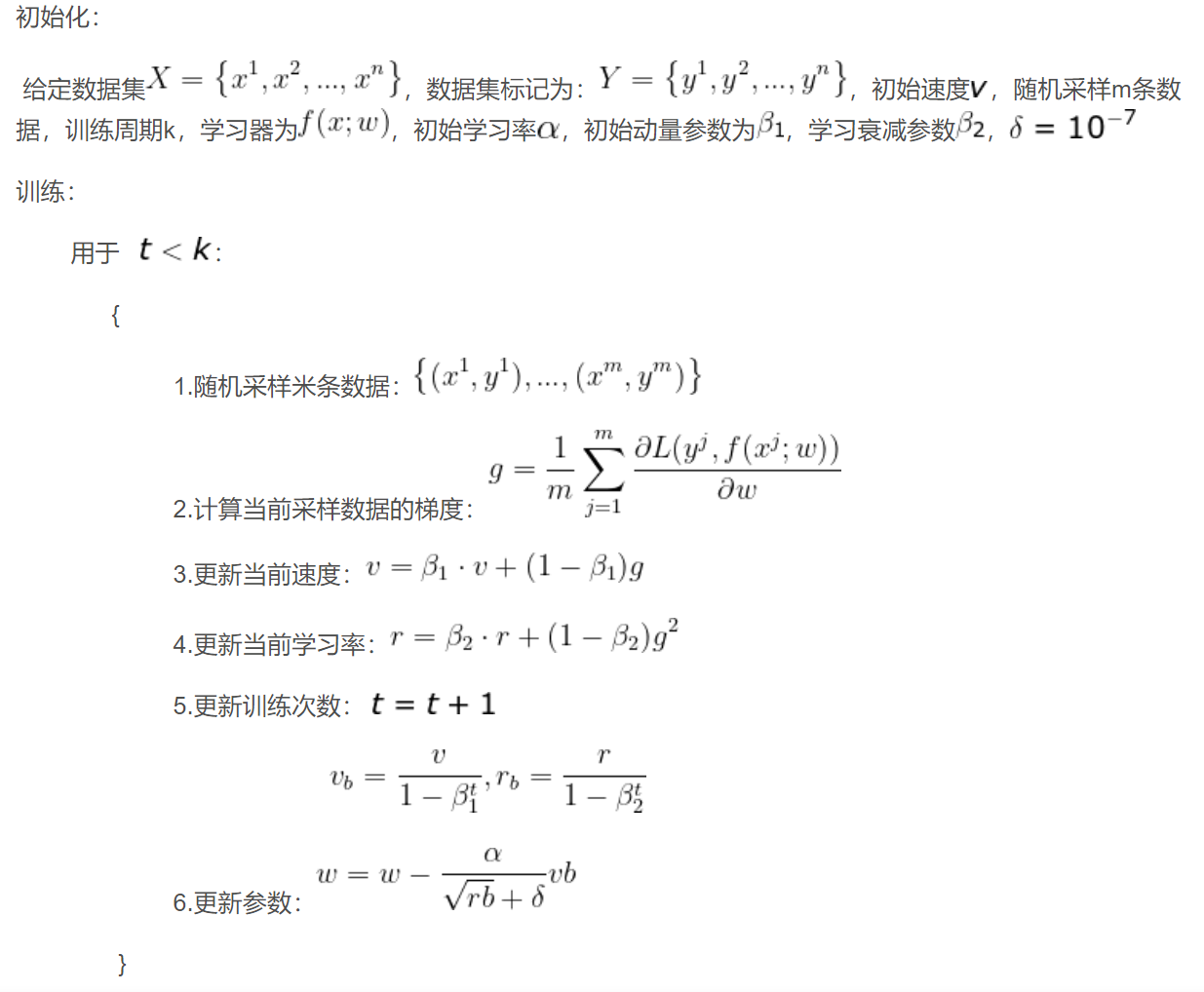
Adam
自适应动量优化算法结合了RMSProp和动量学习法的优势。
二、代码框架
1)数据读取及预处理
直接调用torchvision.datasets中的CIFAR10数据集,对图像进行随机翻转、随机灰度调正、转换为Tensor张量、正则化等预处理操作,返回torch.utils.data.DataLoader作为迭代器。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
import torch
import torchvision
import torchvision.transforms as transforms
batch = 500 # batch_size
def load_data(): # 读取数据,返回迭代器
mean = torch.tensor([0.4915, 0.4823, 0.4468])
std = torch.tensor([0.2470, 0.2435, 0.2616])
# 图像预处理操作
transform = transforms.Compose(
[
transforms.RandomHorizontalFlip(),
transforms.RandomGrayscale(),
transforms.ToTensor(),
transforms.Normalize(mean,std)])
transform1 = transforms.Compose(
[
transforms.ToTensor(),
transforms.Normalize(mean,std)])
trainset = torchvision.datasets.CIFAR10(root='./data', train=True,
download=False, transform=transform)
trainloader = torch.utils.data.DataLoader(trainset, batch_size=batch,
shuffle=True)#,num_workers=1,pin_memory=True)
testset = torchvision.datasets.CIFAR10(root='./data', train=False,
download=False, transform=transform1)
testloader = torch.utils.data.DataLoader(testset, batch_size=batch,
shuffle=False)#,num_workers=1,pin_memory=True)
return trainloader,testloader
2)单次训练
实现一个epoch内的训练函数:
- 向前传播得到预测标签
- 根据预测值计算损失值
- 根据损失值进行反向传播,得到各参数的梯度
- 根据梯度下降更新参数
- 返回损失值
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
def SingleTrain(net,train_iter,loss,optim):
"""train for one epoch
Args:
net (nn.module): training model
train_iter (dataloader): iterator of training set
loss (): loss function of the model
optim (): optimizer of the model
Returns:
float: loss value
"""
net.train() # 开启训练模式
# 将计算累计loss值的变量定义在GPU上,无需在计算时在CPU与GPU之间移动,耗费时间
los = torch.zeros(1).cuda()
for k,data in enumerate(train_iter,0):
x,y = data
# 将数据迁移到GPU
x = x.cuda()
y = y.cuda()
# 清零梯度
optim.zero_grad()
# 向前传播,输出预测标签
haty = net(x)
# 计算损失值
l = loss(haty,y)
# 反向传播,计算得到每个参数的梯度值
l.backward()
# 梯度下降,由优化器更新参数
optim.step()
# 累计损失值
los += (los * k + l.detach()) / (k + 1)
#right += torch.eq(torch.max(haty, dim=1)[1], y).sum()
return los.item()
3)评估正确率
计算用当前网络预测正确的样本个数。
1
2
3
4
5
6
7
8
9
10
11
12
@torch.no_grad() # 使新增的tensor没有梯度,使带梯度的tensor能够进行原地运算
def score(net,data_iter):
net.eval() # 开启评估模式
# 将计算累计正确预测样例数的变量定义在GPU上,无需在计算时在CPU与GPU之间移动,耗费时间
right_sum = torch.zeros(1).cuda()
for k,data in enumerate(data_iter):
X,y = data
X = X.cuda()
y = y.cuda()
# 计算预测标签一致的样例数
right_sum += torch.eq(torch.max(net(X), dim=1)[1], y).sum()
return right_sum.item()
4)main
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
def main():
input,output = 3072,10
hid,hid2,hid3 = 1024,256,84
trainlen,testlen = 50000,10000
train_iter, test_iter = load_data()
#net = LeNet()
#net = MLP(input,output,hid,hid2,hid3)
#net = Softmax(input,output)
net = CNN()
net = net.cuda()
#损失函数
loss = nn.CrossEntropyLoss()
#优化函数
optimizer = torch.optim.SGD(net.parameters(),lr=0.03,momentum=0.9, weight_decay=1e-5)
torch.optim.lr_scheduler.ExponentialLR(optimizer, gamma=0.98)
# torch.optim.lr_scheduler.StepLR(optimizer, step_size=10, gamma=0.65)
#optimizer = torch.optim.Adam(net.parameters(),weight_decay=1e-5)
epoch = 40
start = time()
for i in range(epoch):
t = time()
loss_visual.append(SingleTrain(net,train_iter,loss,optimizer))
# train.append(score(net,train_iter)/trainlen)
test.append(score(net,test_iter)/testlen)
print(f'epoch: {i}\nloss:{loss_visual[-1]}\ntest accuracy:{test[-1]}')
print(f'Time for this epoch: {time()-t}s')
print(f'Time: {time()-start}s\n for {epoch} epoches.\nAverage {(time()-start)/epoch} for each.')
print(f'The optimal test accuracy:{max(test)}')
plt.plot(range(len(loss_visual)),loss_visual)
plt.xlabel('Epoch')
plt.ylabel('Loss')
plt.figure()
#plt.plot(range(len(train)),train,color='blue', label='Train Accuracy')
plt.plot(range(len(test)),test,color='purple', label='Test Accuracy')
plt.legend() # 显示图例
plt.xlabel('Epoch')
plt.ylabel('Accuracy')
plt.ylim((0,1))
plt.show()
if __name__ == '__main__':
main()
三、实验分析
1)Softmax线性模型
对更改优化算法、学习率lr及迭代次数epoch等参数进行实验。
运行结果:
| 优化器及参数 | 损失值 | 训练集表现 | 测试集表现 |
|---|---|---|---|
| Adam lr=0.002 epoch=300 | 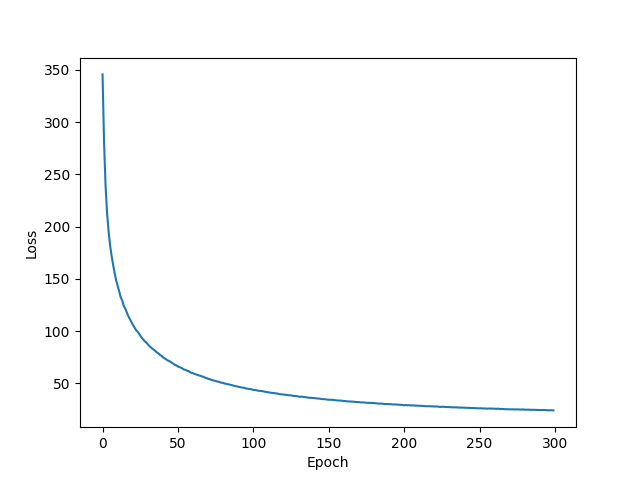 | 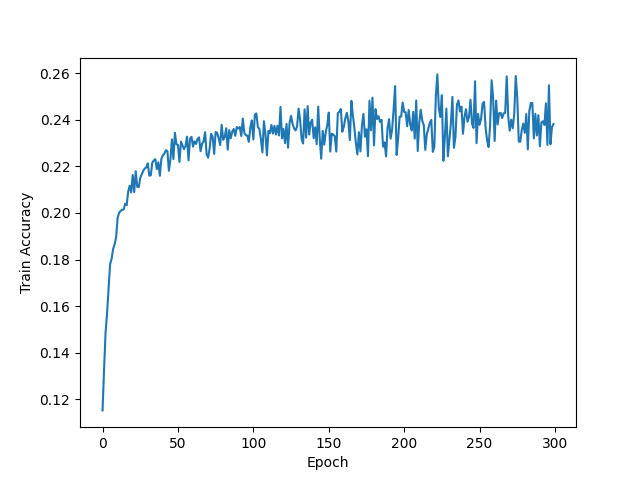 | 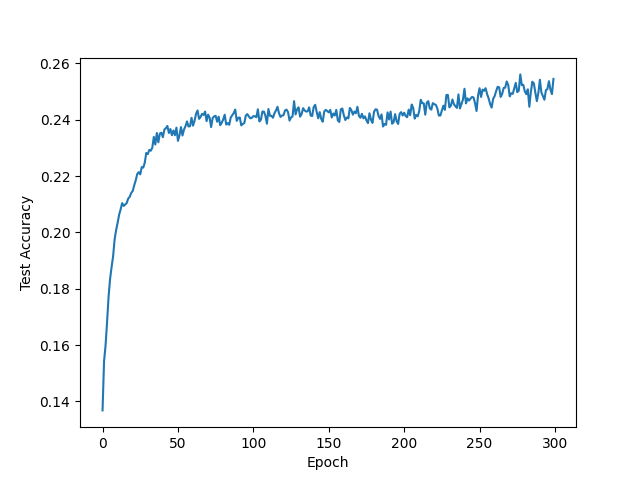 |
| Adam lr=0.05 epoch=30 | 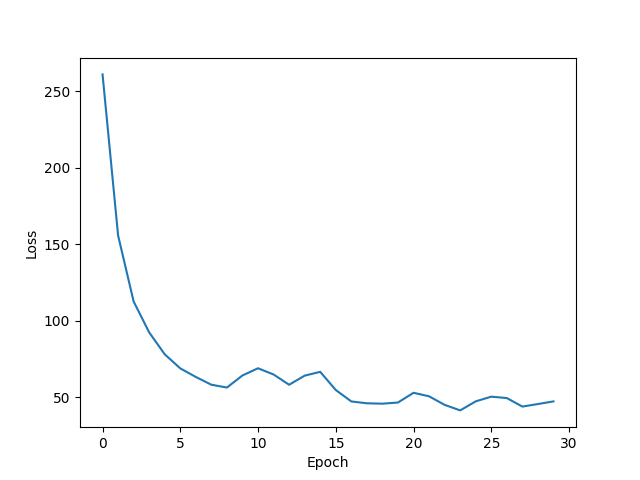 | 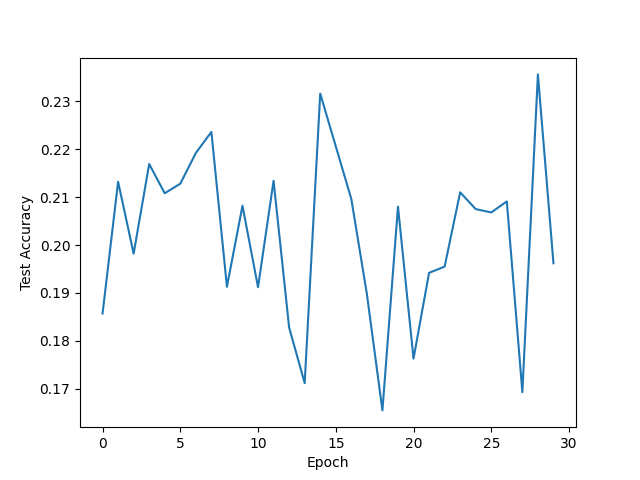 | 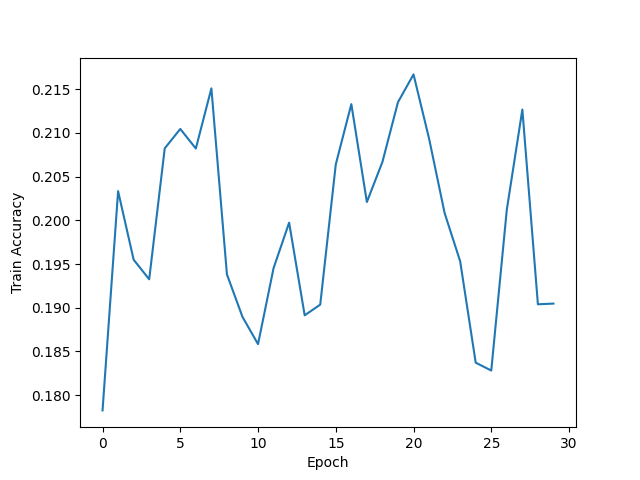 |
| SGD lr=0.03 momentum=0.9 weight_decay=1e-5 epoch=40 | 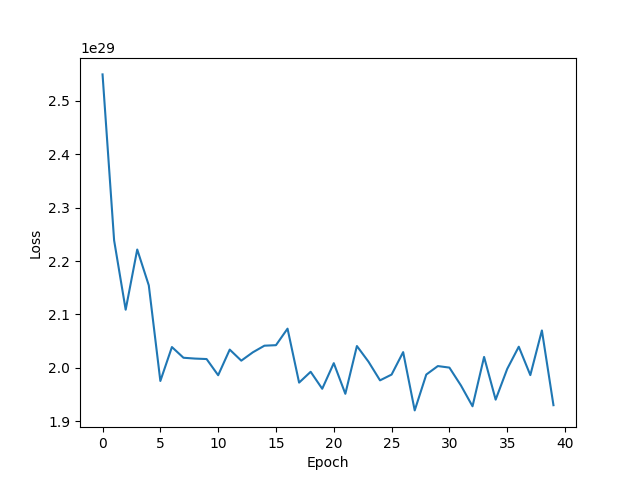 | 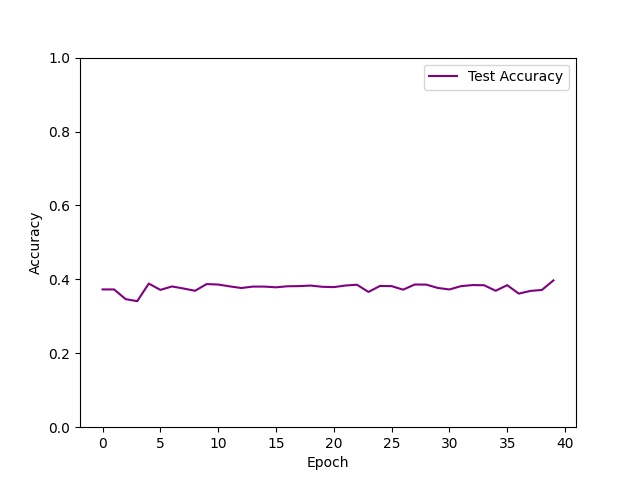 |
从表中可以看出:
- 在训练效率上,使用不同优化算法的时间是相近的,Adam优化算法会较快。Adam采用自适应优化,所以它的优势是训练快,但是问题在于更容易陷入局部最优、鞍点。
- 在训练效果上:
- 使用Adam优化算法时,正确率不如使用SGD Momentum优化算法,损失函数正常收敛,学习率较大时损失函数出现微小的震荡。当学习率为0.002时,迭代了300次后,训练集正确率仅仅是从12%增加到约26%,测试集也是,说明欠拟合。当学习率为0.05时,迭代了30次后,训练集与测试集正确率都在17%到23%左右震荡,绘制正确率图像时没有将y轴范围设置在[0,1],故直观看上去产生强烈震荡,实际上只是在低准确率处小幅震荡,同样欠拟合。
- 使用SGD Momentum优化算法时,可以看到损失函数在大幅下降后存在震荡情况,收敛并不平滑,这也许是由动量衰减因素引起的。此时,测试集正确率能达到39.72%,为该Softmax分类器的最优训练结果,但从测试机正确率图像可以看出,测试机正确率的上涨幅度极小,几乎是一条平稳的直线。
最终选用的最优优化算法及其参数为:SGD算法,学习率0.03,动量衰减因数0.9,权重衰减1e-5
1
torch.optim.SGD(net.parameters(),lr=0.03,momentum=0.9, weight_decay=1e-5)
综上所述,Softmax线性分类器对CIFAR10数据集的分类效果较差,模型训练的拟合效果较差,这是由于,单层神经网络的线性分类器与多维的图像本就难以拟合,为了转换为二维的矩阵计算,将图像的数据进行平展,损失了图像的空间结构信息。
2)MLP模型
通过实验,在SGD算法,学习率0.03,动量衰减因数0.9,权重衰减1e-5条件下,对比了单隐藏层与三隐藏层网络结构的训练效果。
运行结果:
| 网络结构 | 损失值 | 测试集表现 |
|---|---|---|
| input hidden 1(512) output epoch=40 | 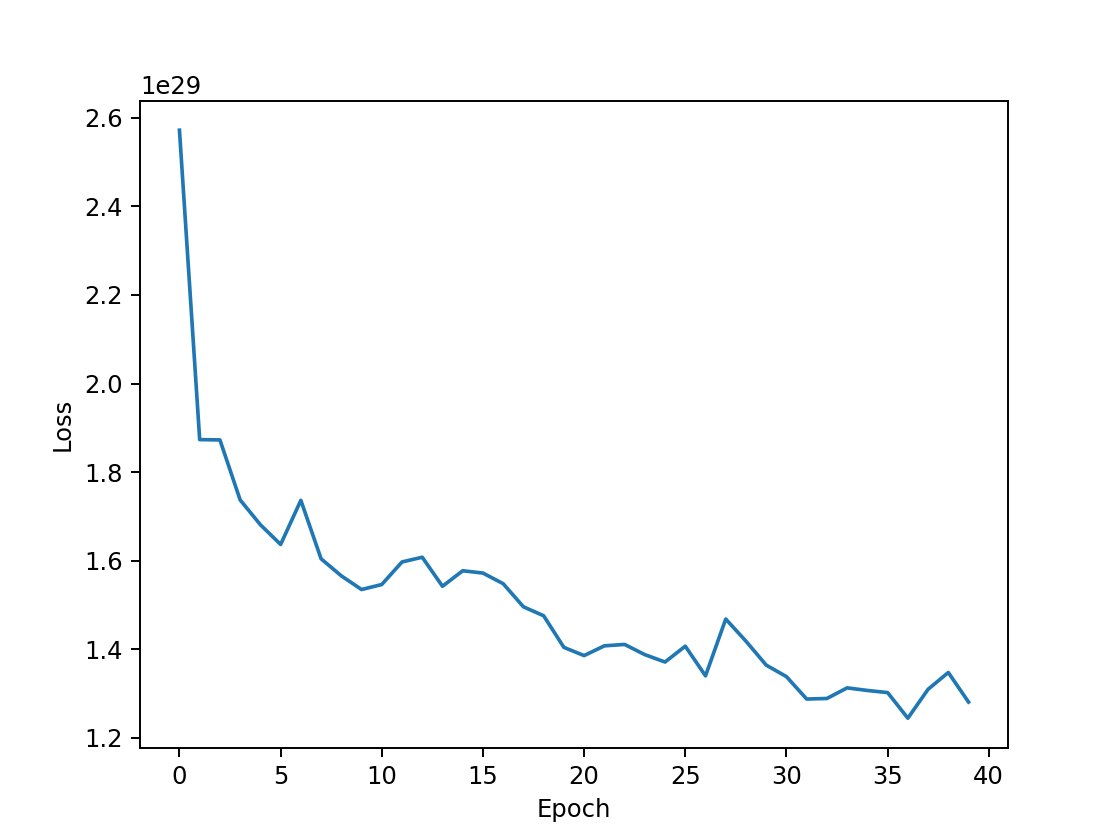 | 50.71%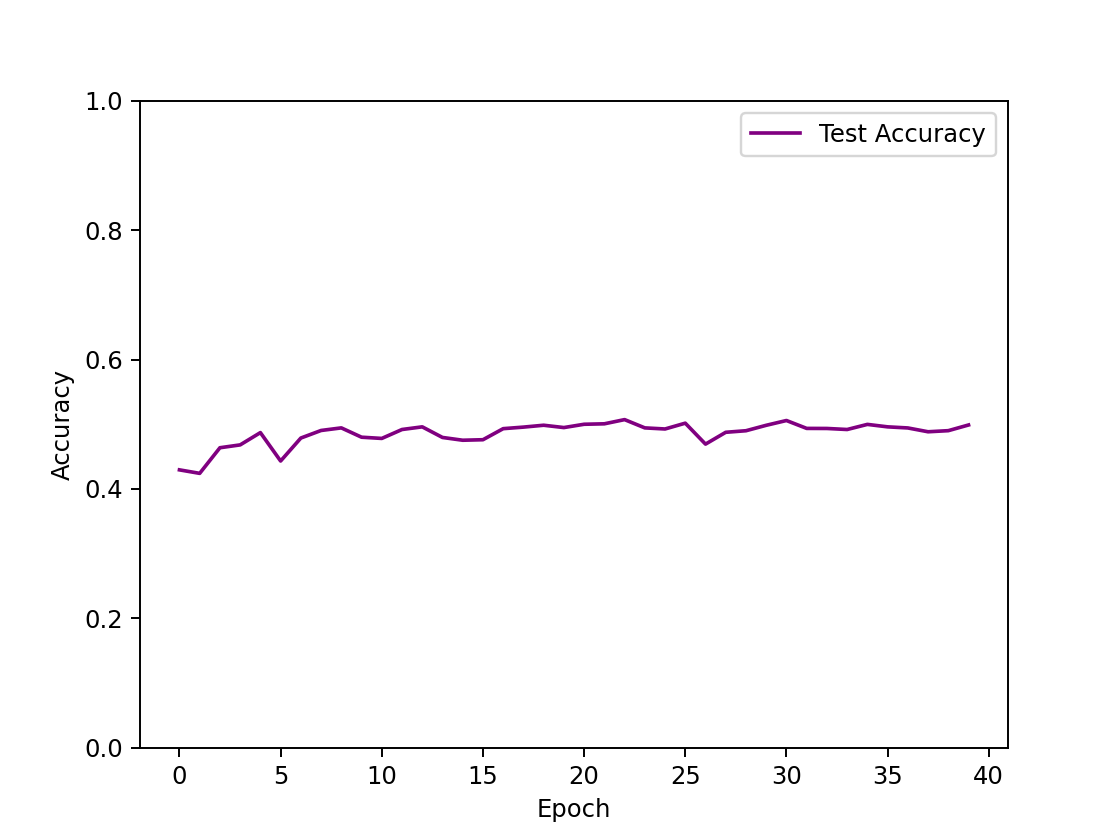 |
| input hidden 1(120) output epoch=20 | 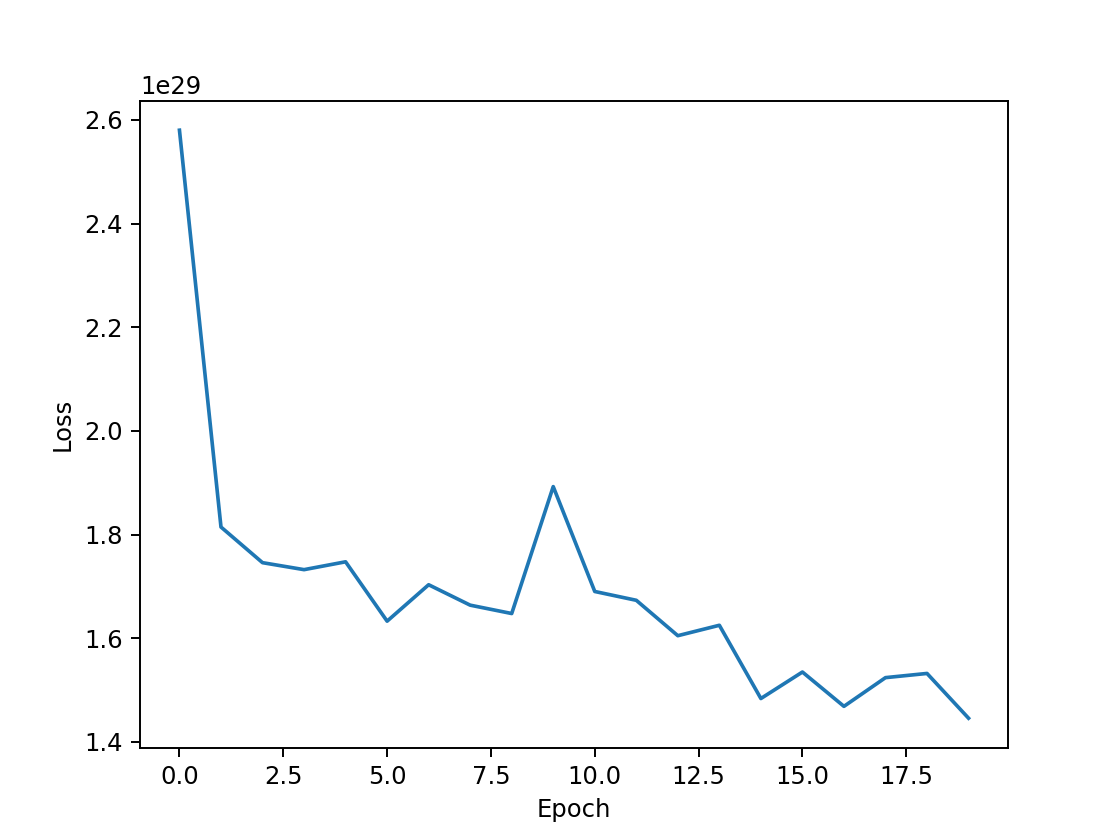 | 49.72%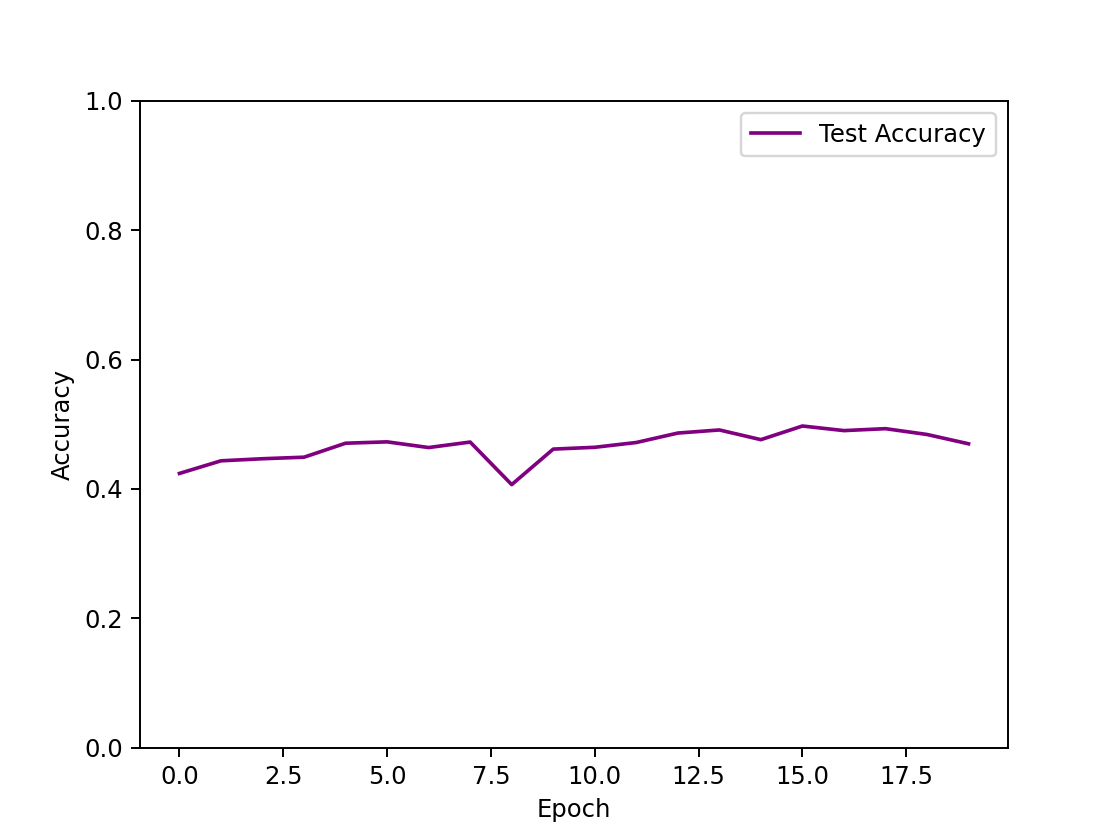 |
| input hidden 1(1024) hidden 2 (256) hidden 3(84) out epoch=60 | 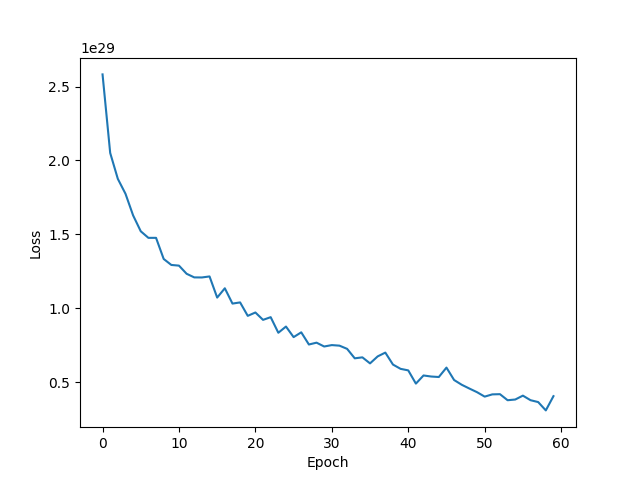 | 58.41%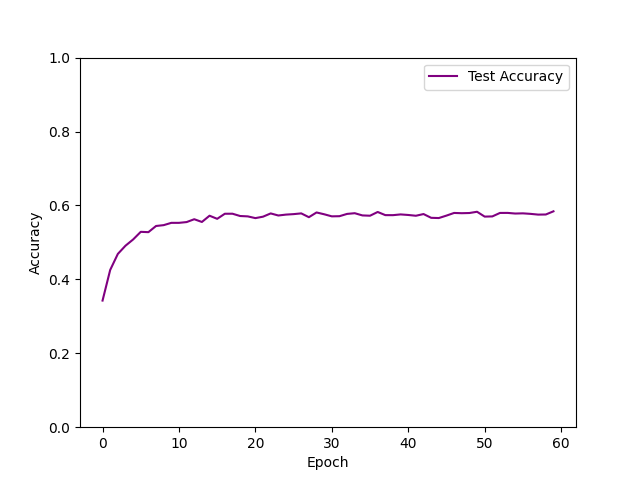 |
| input hidden 1(4096) hidden 2 (1280) hidden 3(256) hidden4(64) out epoch=40 | 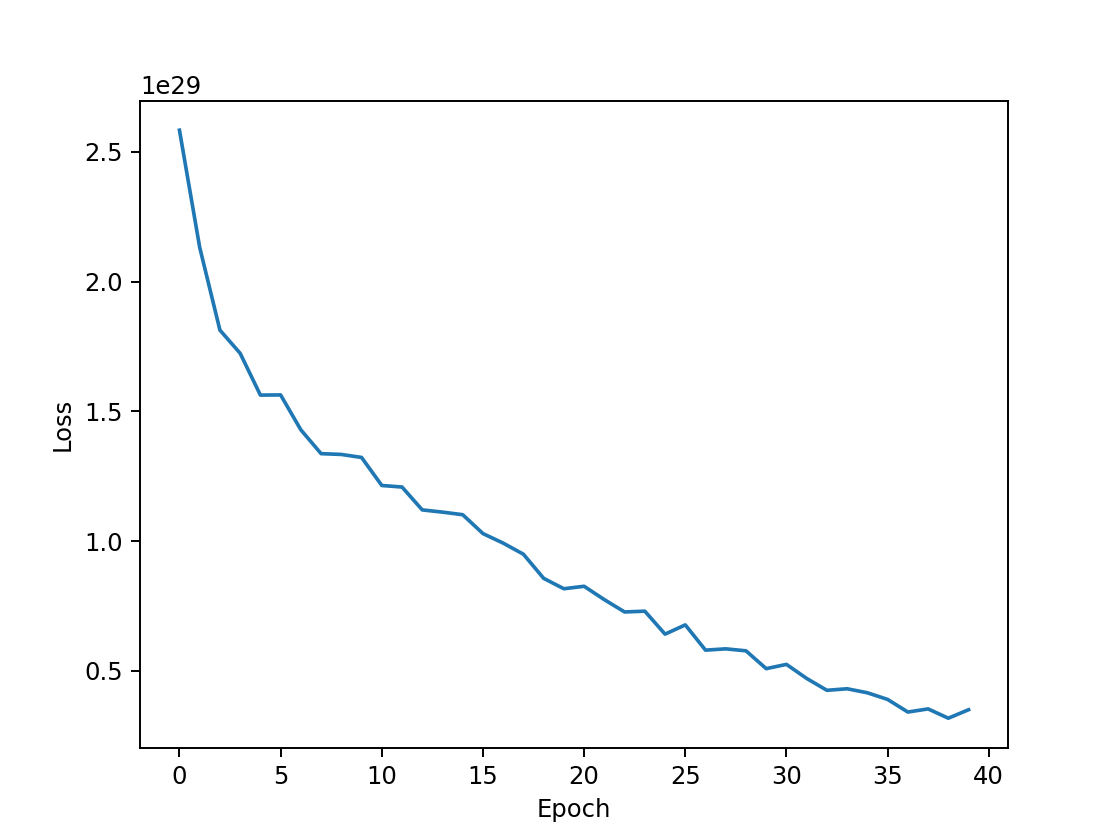 | 60.09%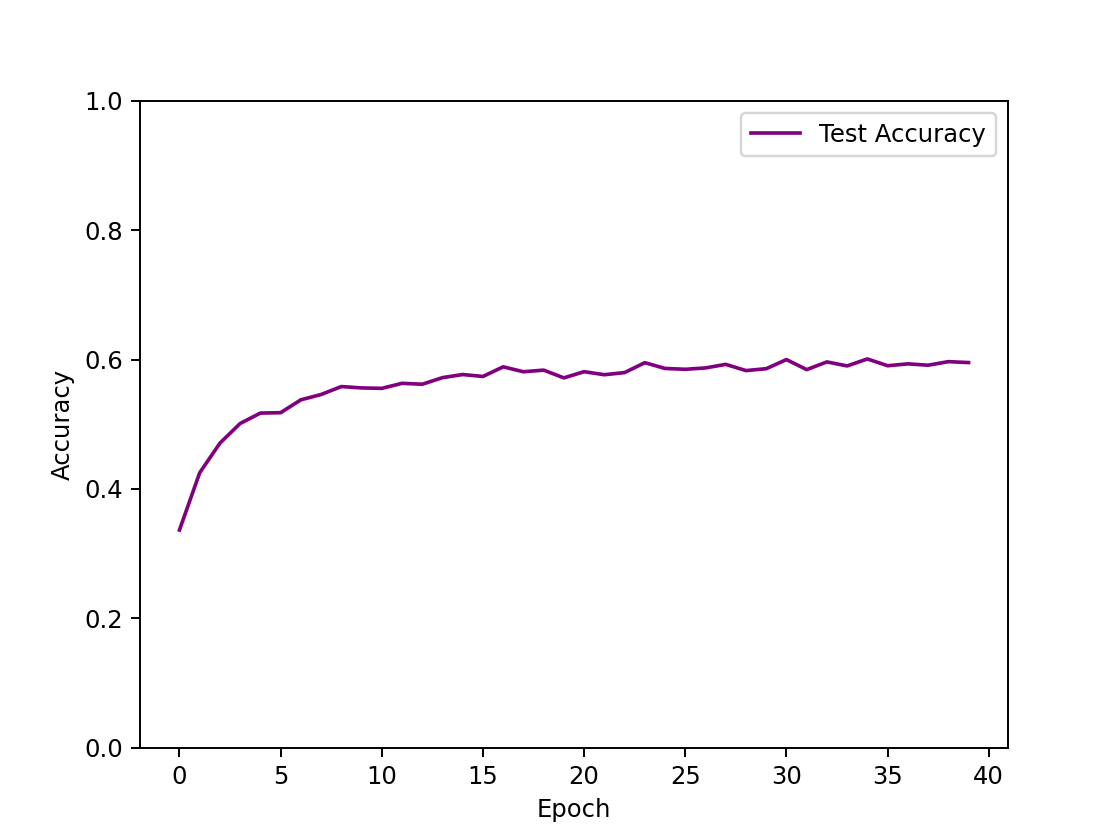 |
从表中可以看出:
- 在训练效率上,网络结构对用时影响甚微,时间基本为18s/epoch。
- 在训练效果上:
- 隐藏层数量的影响:隐藏层越多,非线性的比重更大,模型的拟合效果越好,预测正确率越高。对于单隐藏层的网络结构,最高正确率在50%左右,从图像可以看出,损失函数收敛不平滑,测试集正确率仅从40%上升到50%,训练效果较差,欠拟合。对多隐藏层的网络结构,正确率能接近60%左右,三隐藏层的最高正确率为58%,四隐藏层迭代次数更少而正确率更高,为60%。然而,此时损失函数皆未完全收敛,测试集正确率却已收敛不再增加,说明模型欠拟合。
- 隐藏层神经元数量的影响:在适当范围内,隐藏层神经元数量越多,拟合效果越好。理论上,隐藏层中使用太少的神经元将导致欠拟合(underfitting)。相反,使用过多的神经元同样会导致一些问题。首先,隐藏层中的神经元过多可能会导致过拟合(overfitting)。当神经网络具有过多的节点(过多的信息处理能力)时,训练集中包含的有限信息量不足以训练隐藏层中的所有神经元,因此就会导致过拟合。即使训练数据包含的信息量足够,隐藏层中过多的神经元会增加训练时间,从而难以达到预期的效果。
3)CNN模型
以LeNet网络结构为基础,通过实验,分别对比了优化算法及其参数、网络结构对训练效果的影响。
1、对优化算法及其参数的实验
在LeNet网络结构下,探究不同优化算法及其参数对训练性能的影响。
运行结果:
| 优化器及参数 | 损失值 | 测试集表现 |
|---|---|---|
| SGD lr=0.03 momentum=0.9 weight_decay=1e-5 epoch=60 | 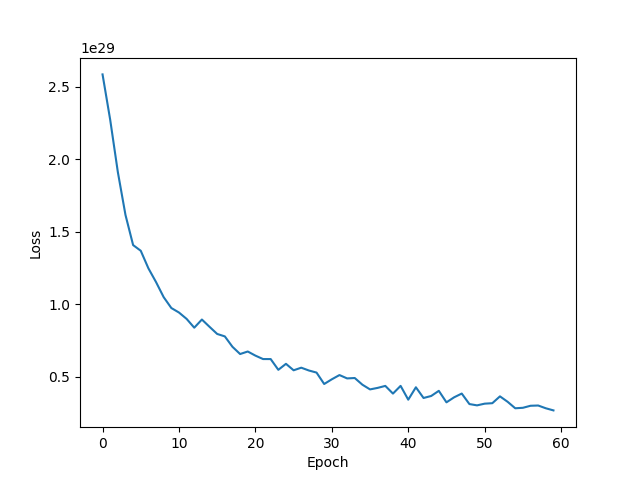 | 73.82%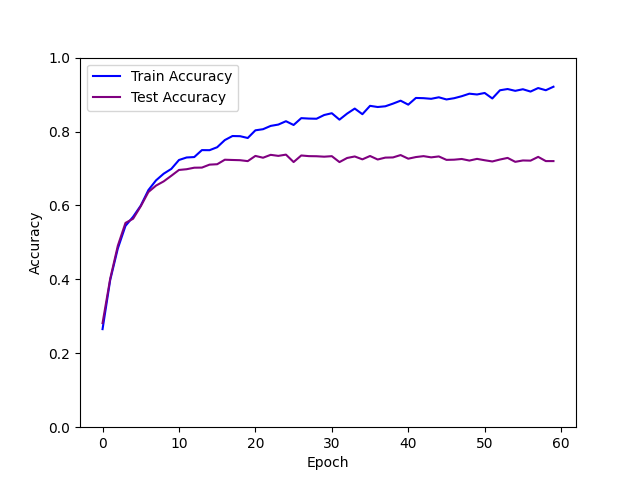 |
| Adam lr=0.001 weight_decay=1e-5 epoch=50 | 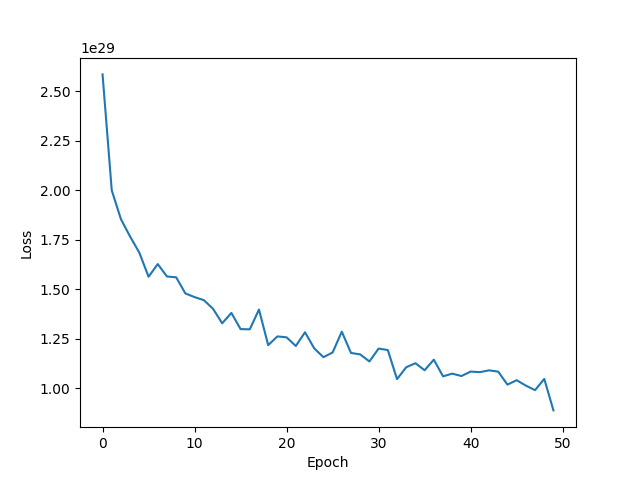 | 62.26%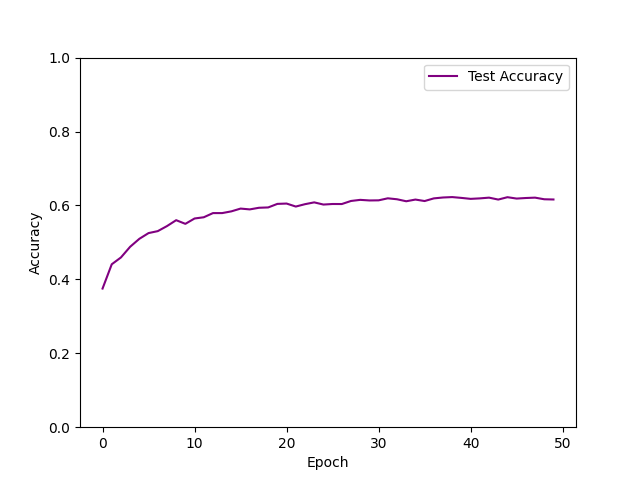 |
| SGD lr=0.03 weight_decay=1e-5 epoch=50 | 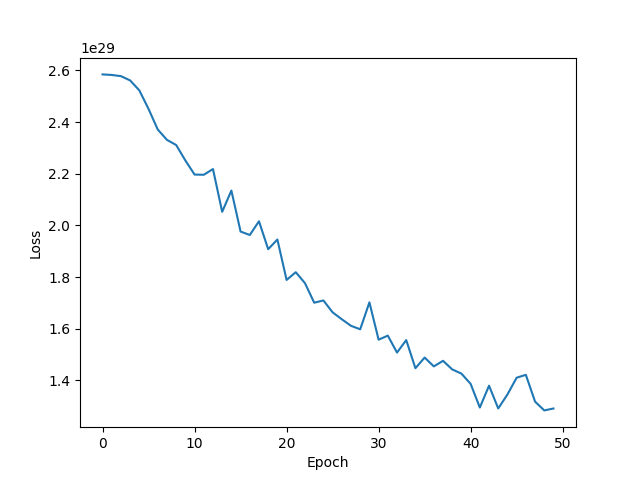 | 61.37%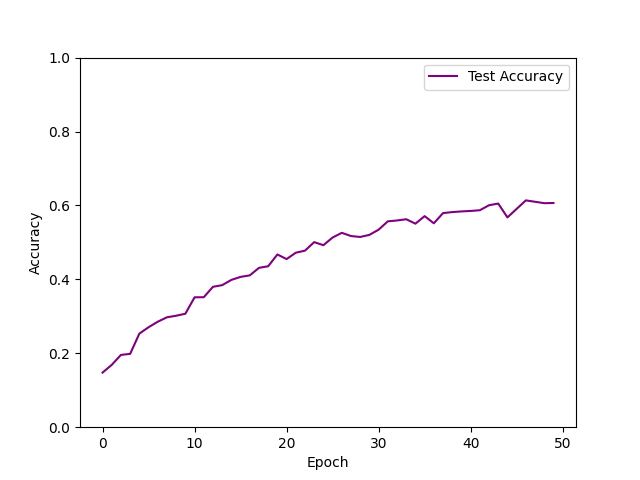 |
从表中可以看出,在训练效果上:
- 使用SGD Momentum优化算法时,经过60次迭代,损失函数正常收敛;模型拟合效果最好,测试集正确率最高,能达到73.82%,训练集正确率能达到90%。
- 使用Adam优化算法时,模型拟合效果较差,正确率仅为62%,也许是因为默认的学习率太低。
- 使用SGD优化算法时,缺乏动量衰减因子后,损失函数收敛速度明显变慢,接近最优点的速度变慢,震荡情况增加,模型拟合效果较差,测试集正确率仅为61%。
2、对网络结构的实验
在SGD算法,学习率0.03,动量衰减因数0.9,权重衰减1e-5条件下,对不同的网络结构进行实验。
运行结果:
| 网络结构 | 测试集表现及用时 |
|---|---|
| LeNet: input Conv(out_channels=6,conv_size=5) MaxPool($2\times2$) Conv(out_channels=16,conv_size=5) MaxPool($2\times2$) linear(120) linear(84) out(10) | 73.82% |
| 在LeNet基础上添加一个卷积层、一个全连接层: input Conv(out_channels=16,kern_size=5) Conv(out_channels=32,kern_size=5) MaxPool($2\times2$) Conv(out_channels=64,conv_size=5) MaxPool($2\times2$) linear(256) linear(120) linear(84) out(10) | 74.5%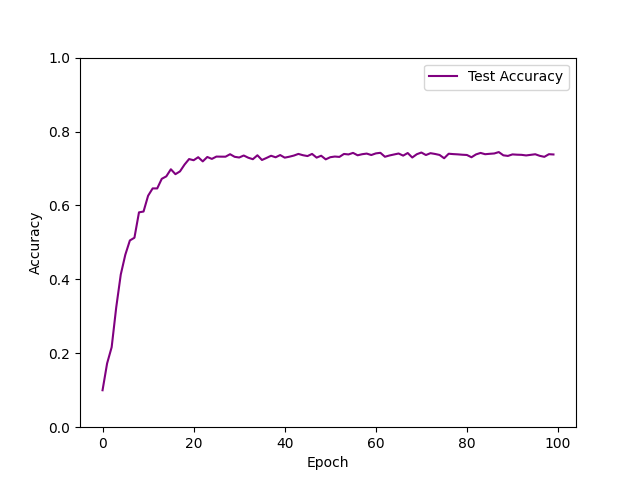 |
| input Conv(out_channels=32,kern_size=3,pad=1) MaxPool($2\times2$) Conv(out_channels=64,kern_size=3,pad=1) MaxPool($2\times2$) linear(1024) linear(512) out(10) | 77.89%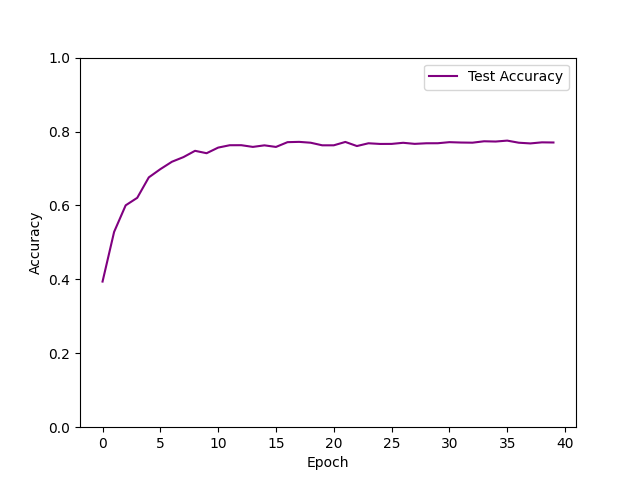 |
| 在LeNet基础上添加两个卷积层、一个全连接层: input Conv(out_channels=6,kern_size=2,pad=2) Conv(out_channels=16,kern_size=2,pad=2) MaxPool($2\times2$) Conv(out_channels=64,conv_size=2,pad=2) MaxPool($2\times2$) Conv(out_channels=128,conv_size=3,pad=2) linear(2069) linear(496) linear(84) out(10) | 78.59%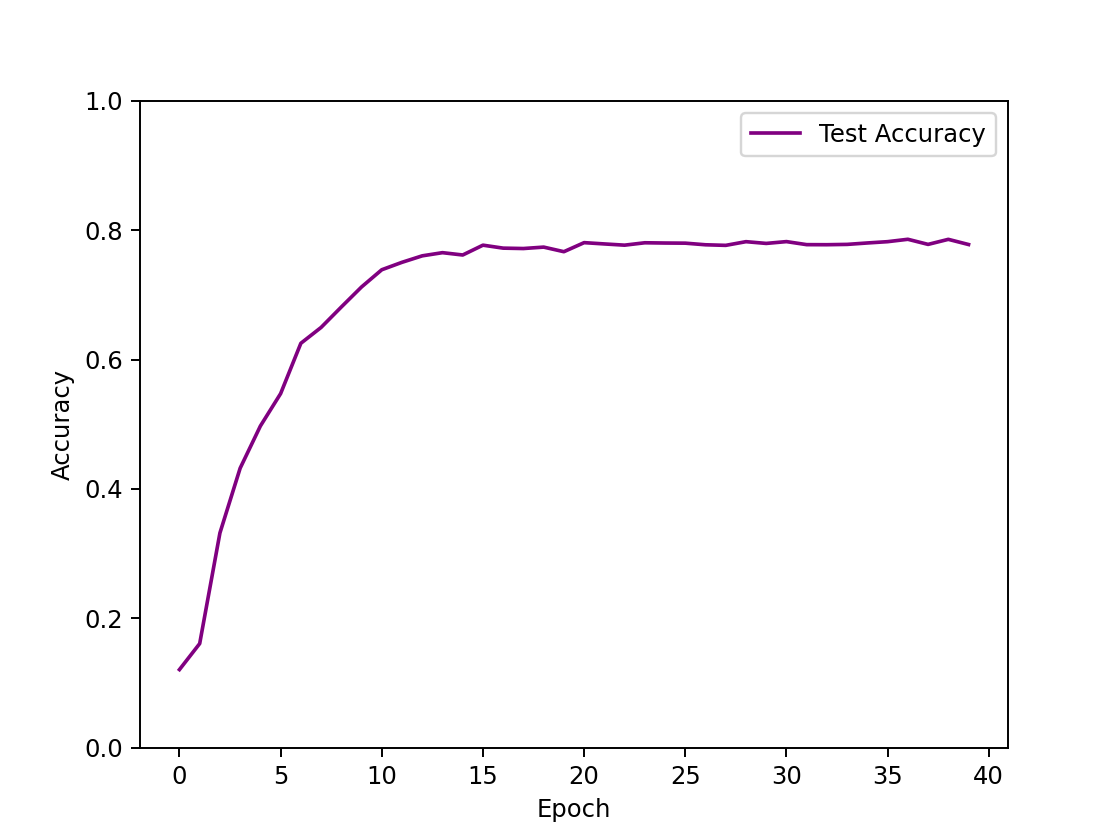 |
从表中可以看出:
- 在训练效率上,相同条件下,卷积层数越少,模型收敛速度越快,且单次epoch用时越少,但网络结构含有2~4个卷积层时一般在18s/epoch左右浮动,实际变动不明显。对于只有两个卷积层、三个全连接层的CNN网络结构,只需要15 epoch就能收敛到最优的正确率。若有三个卷积层、四个全连接层,则需要30 epoch来达到收敛。若有四个卷积层,四个全连接层,用该网络结构训练了两次,epoch皆为25,此时损失函数还未收敛,仍然呈下降趋势,说明收敛速度较慢。
- 在训练效果上:适当增加卷积层、减小卷积核大小,添加零填充层能够增强模型的拟合效果,提高正确率。在适当的范围内,卷积核越小,意味着图像的特征采样越细,故可以提高准确率。添加零填充层,可以防止对边缘像素信息的遗失。若有四个卷积层,四个全连接层,用该网络结构训练了四次,迭代到25次时,一次达到了78%的正确率且已收敛,两次则只达到56%且已收敛,说明卷积层过多,可能出现过拟合的情况。此外,用SGD Momentum优化算法,也可能导致对局部最优点的搜索具有随机性。卷积层过多时,会导致神经元失效,尝试了七层卷积层,正确率一直为0.1,正好10个分类,神经元已经陷入瞎猜。
4)对比三个模型在CIFAR-10图像分类任务上的性能
显然的,CNN模型在图像分类任务上训练效果最佳,最高测试集正确率能达到77%,远超另外两个模型,这是由于Softmax线性模型与MLP模型都基于线性计算,需要将图像的数据进行平展,损失了图像的空间结构信息,而CNN模型可以通过卷积运算,保留读取这些结构信息。次之的是MLP模型,通过增加隐藏层数量,可以得到非线性模型的训练效果,最高测试集正确率能达到60%。拟合效果最差的则是Softmax模型,单层神经网络的线性分类器与多维的图像本就难以拟合,并非意外结果。
在训练效率上,事实上,无论是基于优化算法的实验,还是网络结构的实验,或是模型的实验,都较难观察出训练速度的差别,基本在18s/epoch左右。我在本实验中采用了GPU加速,但对于该模型,BatchSize=500时,极少数情况下,N卡占用率才能达到70%,多数时间有大量空余,真正占用时间的是迭代数据时,CPU对数据集图像的读取及预处理(即transform操作),而非与优化算法、网络机构、模型有关的计算,这是由于用dataloader读取数据时,每epoch要对数据做一次预处理、转换为张量的操作,再迭代取数据,CPU对Tensor的处理很慢,而torchvision库没有将数据集迁移到GPU进行预处理计算的API。因此,未能观察出训练速度的差别。若要解决这个问题,只能使用DALI或其余库接口加速预处理与数据读取,或者将预处理后的数据集进行保存。